Pick-and-Place Machine
Stack
Firmware: STM32, C, Stepper.
PCB: Kicad.
Story
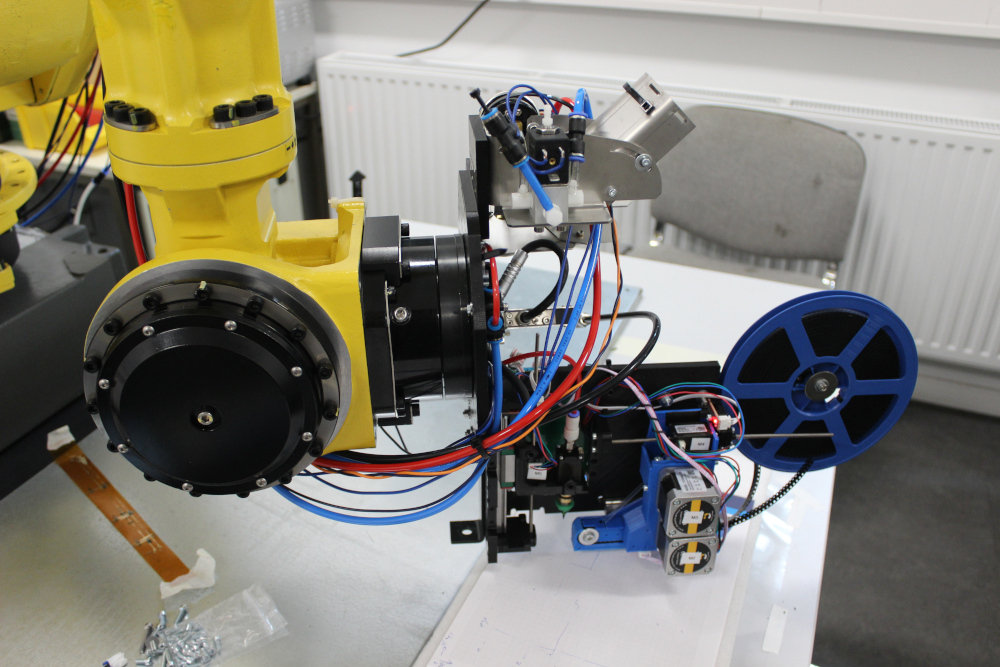
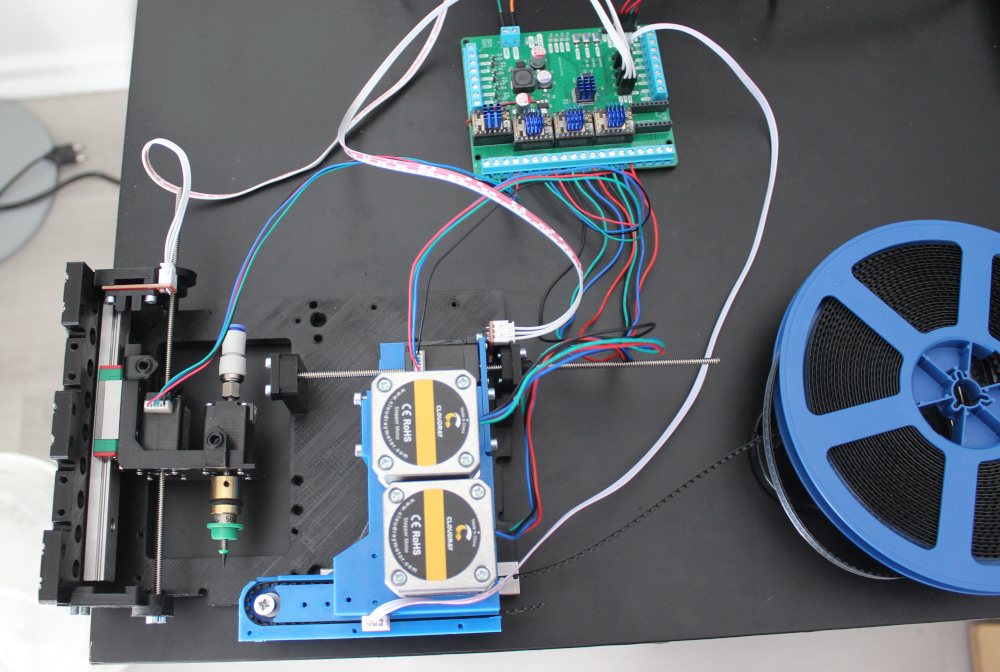
This project was part of building a pick-and-place machine mounted on a robotic arm.
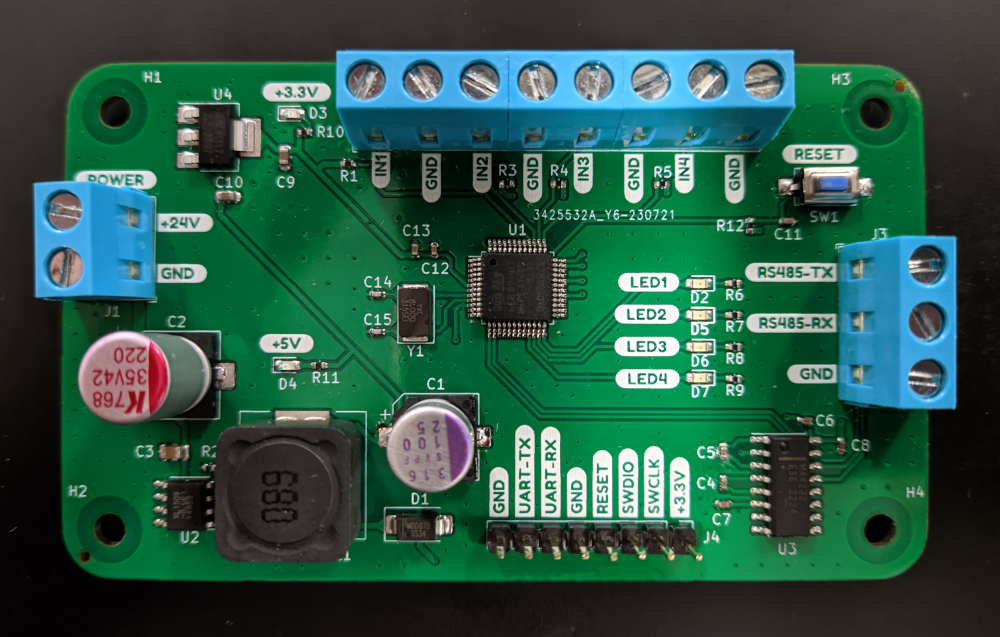
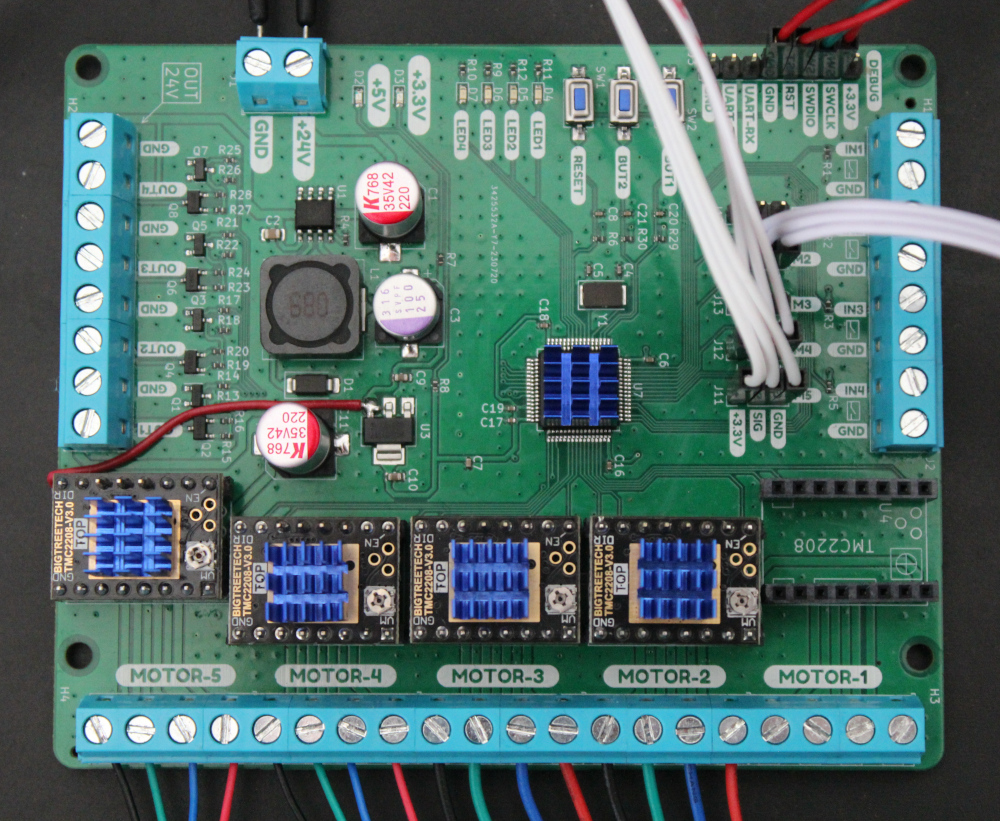
I designed two custom PCBs based on STM32 microcontrollers (STM32G4 and STM32G0), and also developed the firmware for both.
The first board handled communication between the robot arm and a pressure system that controlled solder paste dispensing. The second board controlled four stepper motors to move the pick-and-place head accurately.