Maze-Solving Robot
Stack
Firmware: ESP32, C, Motor.
PCB: Kicad.
Story
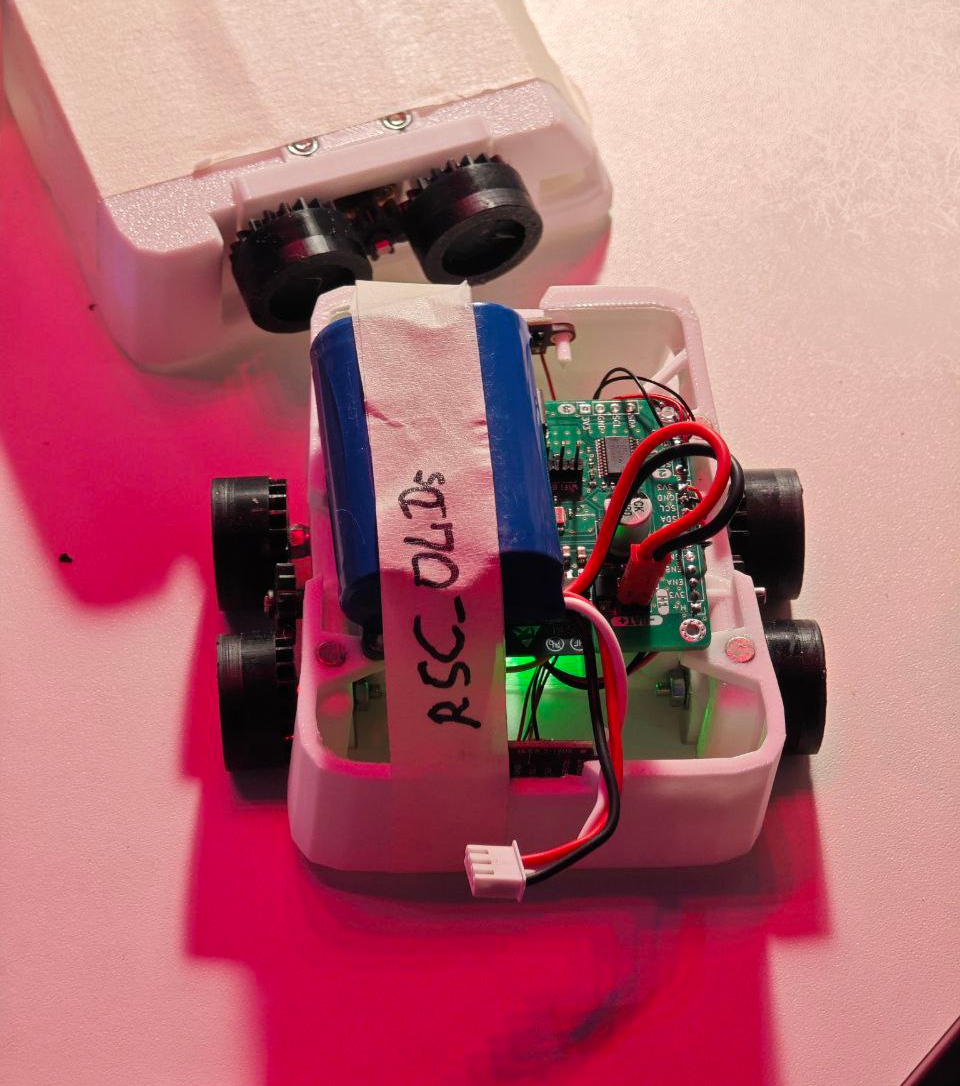
In this project, I created a custom PCB and firmware for a small robot designed to find its way out of a maze. These robots were used in competitions where the goal was to solve the maze as quickly as possible.
I developed the firmware that allowed participants to control the robot over WiFi. This gave users an easy way to test and guide their robots during the events.